��(d��ng)���C(j��)�������b�����\(y��n)��(d��ng)ϵ�y(t��ng),�������Є�(d��ng)�Ќ�(du��)���ε��m��(y��ng)�sһֱ�ǂ�(g��)�y�c(di��n),����(l��i)��Ų���W˹ꑴ�W(xu��)�ĿƌW(xu��)�҂�?y��u)���_(k��i)�l(f��)����������ęC(j��)����,����(d��ng)��������ͬ�ı���r(sh��)�����{(di��o)���Լ������L(zh��ng)�����߲��B(t��i),���@�N�����������������ԴЧ�ʺ��ڲ����A(y��)֪�ĭh(hu��n)���еı��F(xi��n),��
1.�J(r��n)�R(sh��)DyRET
ԓ�C(j��)���˱�����Dyret����Ų���Z(y��)���ǡ���(d��ng)�����˼��,�����Q�����ܸ���(j��)��ͬ�l���Ԅ�(d��ng)��׃�ΑB(t��i)������C(j��)����,��ͨ�^(gu��)���ʹ�Â��������z���^���˹�����,���C(j��)��������������ͬ���Εr(sh��)�R(sh��)�e���C(j��)е���{(di��o)���ȵ��L(zh��ng)���M(j��n)���{(di��o)�����w�Π�,����(y��u)���䲽�B(t��i)���m��(y��ng)�ض����档
�@�(xi��ng)�о���ؓ(f��)؟(z��)����ӵ±�ʾ,���@�N�C(j��)�����ܲ���،W(xu��)��(x��)�������ߵĭh(hu��n)��,��Ȼ��Y(ji��)�������ܿحh(hu��n)���Ы@�õ�֪�R(sh��)��(l��i)�m��(y��ng)�h(hu��n)��,��
��(j��)�˽⣬�о��ˆT����Ӗ(x��n)���C(j��)��������ʯ,��ɳ�Ӻͻ������ϵ���������,��Ȼ�����ڏ�δ����IJݵ������ߡ��mȻ�@�ƺ��������韩�ĵ���,�����о��ˆTָ��,���κβ�ͬ�ΑB(t��i)�ĵ��挦(du��)�L(zh��ng)�șC(j��)���ˁ�(l��i)�f(shu��)����ȫ������������(zh��n)��
�@�N��ƹ���׃�ΙC(j��)���˿��Ԅ�(d��ng)�B(t��i)�����L(zh��ng)����ֻ��,���о��ˆT��Ų���ͰĴ������M(j��n)���˜y(c��)ԇ,������DyRET�W(xu��)��(x��)������L(zh��ng)��s������֫�����m��(y��ng)��ͬ��͵ĵ���,���W˹ꑴ�W(xu��)��Ų����(gu��)���о��C(j��)��(g��u)��Ӌ(j��)��C(j��)�ƌW(xu��)����ӵ��f(shu��)�����F(xi��n)�A���ѽ�(j��ng)���Ԍ��C(j��)���ˎ�������,�����ҌW(xu��)��(x��)�m��(y��ng)�h(hu��n)�������܉�ʹ������x������������,�,���
2.����C(j��)���˵ď�(f��)�s���M(j��n)����
�����(d��ng)��](m��i)����֫����չ����?y��n)����ȏ�����W(xu��)���v�@�Dz����ܵ�,������Ҳ���DZ�횵�,�����ڔ�(sh��)���f(w��n)����M(j��n)����������w,���C�������Ƕ����������y�����ŵ�������,���ڱ����\(y��n)��(d��ng)�^(gu��)���п��Բ�����ҕǰ�����ϵK������P(gu��n)��(ji��)��s�Ĺ��܄t�](m��i)��,��
������s����֫,��ҕ�l�؈D��(l��i)��?sh��)W˹ꑴ�W(xu��)
��һ���棬�C(j��)���˵��M(j��n)��Ҳ��ҪһЩ�{(di��o)��,����ʹ��ʿ�D��(d��ng)����˾�ęC(j��)����Spot֮ij���(j��)��(f��)�s�C(j��)��,��Ҳ�o(w��)���ڏ�(f��)�s�ĵ����Ќ�(d��o)����ʹ�C(j��)������s֧�ȼȿ����������?c��)ڲ�ͬ�������Ƅ?d��ng)�r(sh��)�ķ�(w��n)����,���ֿ��������Ч,����̎�y���(hu��)���Ĵ�����늳���������ҙC(j��)���˻΄�(d��ng)���ܕ�(hu��)�����Լ�������,��
�����J(r��n)����п��{(di��o)��(ji��)�����w��һ��(g��)�e�õ�����,�����ϼ��ݴ�W(xu��)�Ĺ��̎�������˹�ơ����R�_������˹�f(shu��)�������c�_(k��i)�l(f��)�^(gu��)����C(j��)����,�,������g(sh��)�ڲ�����������{(di��o)��(ji��)�ęC(j��)��ʹδ��(l��i)�ęC(j��)����׃�ø����`��,�,���
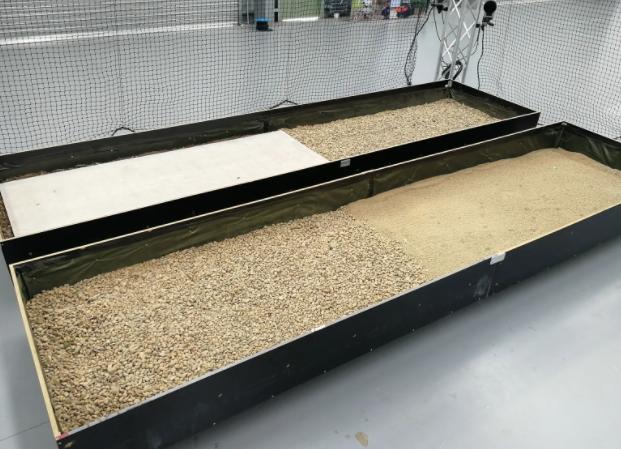
��ӵº�����ͬ�����ȏ������Ϙ�(g��u)���ˌ�(sh��)�(y��n)ɳ��,��DyRET����ƽ��Ӗ(x��n)�����ڌ�(sh��)�(y��n)����,��������ˮ��,���[ʯ��ɳ��������L(zh��ng)�L(zh��ng)�ĺ��ӣ������˙C(j��)�����ڬF(xi��n)��(sh��)�����п��ܰl(f��)�F(xi��n)�ĸ��N��ͬ����,�,����������^ƽ������ɳ�س�M���_����,����?y��n)�ÿ��һ��,���C(j��)���˵��ȶ���(hu��)�Aб�����³����[ʯ��һ�N��(ji��n)Ӳ��������|(zh��),������ʯ��(hu��)�Ƅ�(d��ng),��ʹDyRET���_��׃��ۘ�ǡ���ӵ��f(shu��)����ͨ�^(gu��)���в�ͬӲ�Ⱥʹֲڶȵ�����(g��)����ʾ��,�����Ժܺõر�ʾ���C(j��)�����ΑB(t��i)�����w�c�h(hu��n)��֮�g��һ�������,����
��(sh��)�(y��n)�҃�(n��i)Ӗ(x��n)���C(j��)����ƽ��ȵIJ�ͬ�������|(zh��)
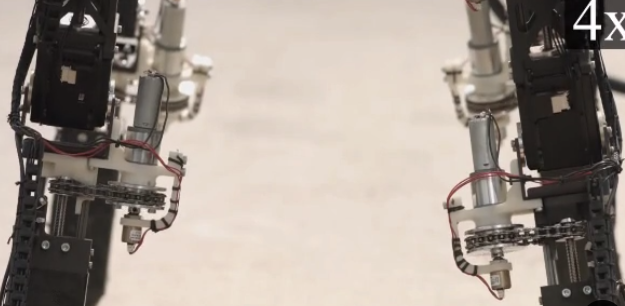
DyRET�C(j��)�������Ă�(g��)��,��픲���һ��(g��)�ֱ�,�����о��ˆTץס���C(j��)���˵��ȿ�����������6Ӣ��,���������ڃɂ�(g��)λ�����죺��ϥ�w�Ϸ��ġ��ɹǡ���ϥ�w�·��ġ�Ä�ǡ�,���@ʹ�C(j��)���܉��Բ�ͬ���L(zh��ng)���O(sh��)����֧�Ȳ��֡�������������s��֫,��ʹ��ɹǸ��L(zh��ng)��Ä�Ǹ���,����֮��Ȼ���о��ˆT�����{(di��o)���@Щ����,����DyRET�ŵ�ÿ��(g��)������,����������؈һ���\(y��n)��(d��ng)��Ȼ��Ӌ(j��)������?c��)�ÿ��(g��)�����е�Ч��,��
�����w���f(shu��),���о��ˆT�����Ƅ�(d��ng)�ɱ���ҕ��һ�NЧ��,���@�c����W(xu��)���^���(d��ng)���\(y��n)��(d��ng)�r(sh��)��ʹ�õĶ�����ͬ,��������,���@��һ��(g��)�����C(j��)�������Ķ���������(l��i)��(sh��)ʩ�Ƅ�(d��ng)���О�,�����ߕr(sh��)����������(w��n)���Զ������a����X��,���@��(du��)��DyRET�@�ӵİ��F�C(j��)���˺���Ҫ,��
�о��ˆT�y(c��)���˙C(j��)�����P(gu��n)��(ji��)늙C(j��)�е���������,����ʹ�Ôz���^�O(ji��n)ҕ���\(y��n)��(d��ng)��ԓ�C(j��)����߀�����Լ�����ȸБ�(y��ng)���C(j��),�����ڱ�������Ĵֲڶ�,�����磬�^�쵽�������ȵ[ʯ�⻬�ö�,���C(j��)���������Ԍ��_ֺ����ˮ��,�������@ô�f(shu��)���_�ϵ��������������ṩ���P(gu��n)ɳ�ӱȻ�����ܛ�ö����Ϣ���z��C(j��)����������һ���DyRET�ṩ�ˏ�(f��)�s��ҕ�X(ju��),���S�r(sh��)�O(ji��n)���������ߵ��^(gu��)���Լ��\(y��n)�е�Ч��,��
��(d��ng)�C(j��)���˙z�y(c��)�������ڏĻ������^(gu��)�ɵ��[ʯ�r(sh��)�����Կ����������˸߶�
�о��ˆT�l(f��)�F(xi��n),���ڻ����������ߕr(sh��),��׃�ΙC(j��)���˵����^�L(zh��ng)��Ч�����,����ɳ����,��ֻҪÄ�Ƕ̣����Ϳ�����Ч����s�κιɹ��L(zh��ng)��,���ڵ[ʯ��,��DyRET�����w֫�w�^�̣����F(xi��n)�ܳ�ɫ,���@���е����ģ��^�͵����Č�ʹ�C(j��)������С�rʯ�������r(sh��)���и��õķ�(w��n)����,��һ���(l��i)�f(shu��)���^�̵���ʹ�C(j��)���˿���ʩ�Ӹ��������ס�^�ɵ�����,�����^�L(zh��ng)���Ȅt����������^�⻬���������ߵ��ٶ�,��
�����@ЩӖ(x��n)����C(j��)�����ṩ�����ᘌ�(du��)�ض����棬�f(xi��)�{(di��o)֫�w���õĽ�(j��ng)�(y��n),�����,����(d��ng)�о��ˆT�S��DyRET�������������ϕr(sh��)���C(j��)���˿�������z��C(j��)עҕ����,����ͨ�^(gu��)����������(l��i)��֪���_�µ����w,�����@Щ��(sh��)��(j��)�c���P(gu��n)���������^�ĸ��X(ju��)����ǰ��Ϣ�M(j��n)�б��^��Ȼ��,���C(j��)���˱�֪������ڵ�·������,���{(di��o)����������(sh��)�F(xi��n)����Ч��,��

DyRET���������m��(y��ng)��Ƥ����,��������ı��F(xi��n)߀�ܲ���(w��n)�������Ǻܿ죬�����܉��˽���Щ���w�Π���F(xi��n)����,���m��(y��ng)�h(hu��n)��
3.δ��(l��i),���C(j��)���˸�֪�m��(y��ng)�Լ������w
�S���C(j��)���ˌW(xu��)��(x��)���g(sh��)׃��Խ��(l��i)Խ��(f��)�s�����^(gu��)ȥʮ�����ҵĕr(sh��)�g��,���C(j��)���ˌ�����(x��)�T��ģ�M��Ӗ(x��n)������C(j��)����,��Ҳ�����f(shu��)����ҪӖ(x��n)����̓�M�����п��ƙC(j��)���˵�ܛ��,����ԓ̓�M������,��ģ�M�ęC(j��)���˿����M(j��n)�Д�(sh��)ǧ�β��ЇLԇ����ͨ�^(gu��)����(f��)ԇ�(y��n)��(l��i)�W(xu��)��(x��),��ԓϵ�y(t��ng)��(hu��)���P�e(cu��)�`����(ji��ng)��(l��)�ɹ��IJ���,��ֱ��̓�M�C(j��)���ˌW(xu��)��(x��)��ָ���О��ֹ���@��һ�N�Q�鏊(qi��ng)���W(xu��)��(x��)�ļ��g(sh��),��Ȼ��,���C(j��)���ˌ��ҿ��Ԍ��@Щ֪�R(sh��)��ֲ���F(xi��n)��(sh��)�����еęC(j��)���˺Ͳ��ЙC(j��)�С�
����֮��,��ԓ���g(sh��)���ڡ�ģ�M���F(xi��n)��(sh��)���^(gu��)�ɵĆ�(w��n)�}���o(w��)����̓�M�h(hu��n)����������ģ�M��������ď�(f��)�s��,�����ͨ�^(gu��)ģ�M�@�õ�֪�R(sh��)���������c�F(xi��n)��(sh��)�������Ǻϣ��@��ζ����(sh��)�H�ęC(j��)���˿��ܕ�(hu��)��(du��)�܇��ĭh(hu��n)����ģ�����˽�,��
���֮��,���@Щ�о��ˆTʹ��DyRET������ֻ���ڬF(xi��n)��(sh��)������Ӗ(x��n)���C(j��)���ˡ���(d��ng)Ȼ,���@Ҳ����(l��i)���µ�����(zh��n)��׃�ΙC(j��)���˵ČW(xu��)��(x��)�ٶ�Ҫ���ö�,�����п��ܽ�(j��ng)����?y��n)�ˤ���ܵ��p�����W˹ꑴ�W(xu��)Ӌ(j��)��C(j��)�ƌW(xu��)�҄P�������R���f(shu��)�������β��������(sh��)�H�ٿر��f(shu��)����(l��i)Ҫ�y�ö�,�����o(w��)܉�E��ѭ,���y��ͨ�^(gu��)ģ�M��(l��i)��(sh��)�F(xi��n)�,���,��
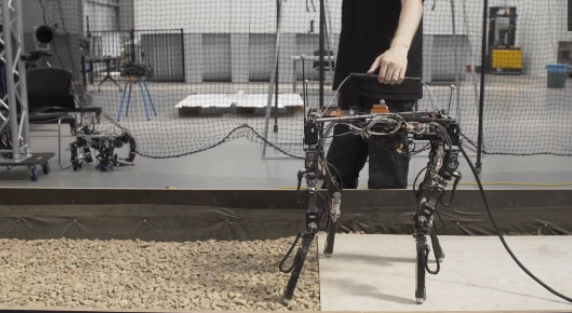
���^���f(shu��)����(d��ng)��DyRET���\(y��n)��(d��ng)��Ȼ�@�þ���,���������cSpot�@�ӵ����M(j��n)����C(j��)�������,����������Ҫ90�������ȫ��չ���տs�C(j��)���˵��ȡ������о��ˆTϣ������ͬ�r(sh��)����DyRET��Ӳ���͵��㷨,��Ҳ�S��һ�����ʹ����׃�ΙC(j��)���˶��ɲ����@�ϵ�y(t��ng),����(sh��)�H�ϣ��ڙC(j��)���ˌ�(sh��)�(y��n)����,��������뷨��ʹӲ����ܛ���f(xi��)ͬ����,����ʹ�C(j��)���˸��õظ�֪���β��m��(y��ng)�����w���О飬�@�����C(j��)���˼��g(sh��)��������(l��i),������(l��i)Դ��Ҽ���� ��



 ��������
�������� ��(hu��)�T����
��(hu��)�T���� �ھ��ͷ�
�ھ��ͷ�