0
┘Å╬’▄ć
Į±╚šĘųŽĒABBÖC(j©®)Ų„╚╦╩╣ė├Ū░Ą─š{(di©żo)įć▓Į¾EŻ¼┐┤Ž┬─ŃČ╝Ģ■┴╦åß,Ż┐
1ĪóÖC(j©®)Ų„╚╦┼c┐žųŲ╣±Ą─░▓čbĄĮ╬╗
2.ļŖ└|▀BĮėŻ©░┤šš╣®æ¬(y©®ng)╔╠ĮoĄ─░▓čb╩ųāį,Ż¼▓óŪęūóęŌ┐žųŲ╣±Ą─╣®ļŖöĄ(sh©┤)ō■(j©┤)Ż®
3.Įė╚ļų„ļŖį┤ĪóÖz▓ķų„ļŖį┤▓óŪę╔ŽļŖ
4.į┌╔ŽļŖ═Ļ║¾,Ż¼╩ūŽ╚ę¬▀M(j©¼n)ąąÖC(j©®)ąĄ▌SĄ─ąŻ£╩(zh©│n)┼c▐D(zhu©Żn)öĄ(sh©┤)ėŗöĄ(sh©┤)Ų„Ą─Ė³ą┬�,ĪŻ©Ė∙ō�(j©┤)Ż║ąŻ£╩(zh©│n)ģóöĄ(sh©┤)▀M(j©¼n)ąąįO(sh©©)ų├Ż®
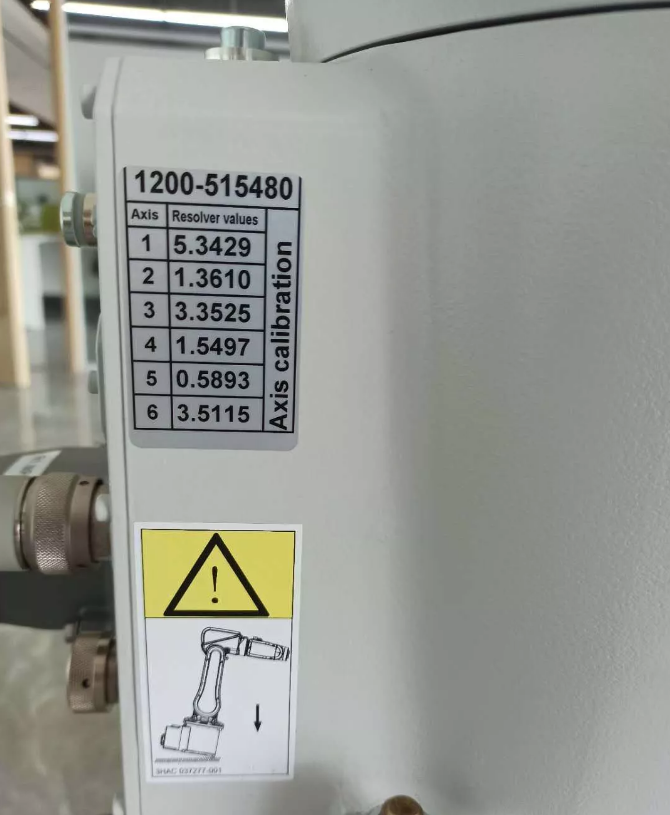
A.ąŻ£╩(zh©│n)Ū░Ż¼▒žĒÜ╩ųäėīóÖC(j©®)Ų„╚╦┴∙éĆ▌S╗žĄĮįŁ³cŻ©ÖC(j©®)ąĄ┐╠Č╚╠ÄŻ®
B.▓ķšęĄĮ▌SąŻ£╩(zh©│n)Ą─öĄ(sh©┤)ō■(j©┤)
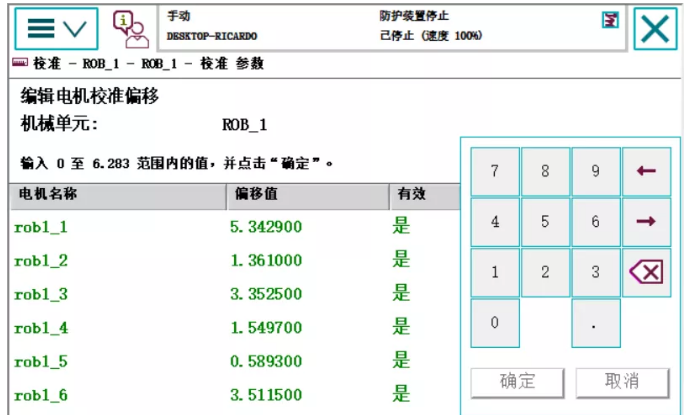
C.į┌╩ŠĮ╠Ų„ųąĄ─┐žųŲ├µ░Õ=>ąŻ£╩(zh©│n)=>ąŻ£╩(zh©│n)ģóöĄ(sh©┤) ųą▀M(j©¼n)ąą▌ö╚ļąŻ£╩(zh©│n)öĄ(sh©┤)ō■(j©┤)
D.Ė³ą┬═ĻąŻ£╩(zh©│n)ģóöĄ(sh©┤)║¾,Ż¼▀ĆąĶę¬Ė³ą┬▐D(zhu©Żn)öĄ(sh©┤)ėŗöĄ(sh©┤)Ų„
5.▓ķ┐┤ī”æ¬(y©®ng)Ą─ÖC(j©®)Ų„╚╦╩ųāį,Ż¼┼õųŲ║├IOįO(sh©©)Č©
6.░▓čb║├╣żŠ▀║═ų▄▀ģįO(sh©©)éõ
╚²éĆųžę¬öĄ(sh©┤)ō■(j©┤)Ż║
┤_šJ(r©©n)╣żŠ▀Ą─TCP³cŻ©tool0×ķÖC(j©®)Ų„╚╦╩ų═¾╠ÄĄ─ŅA(y©┤)Č©┴xū°ś╦(bi©Īo)ŽĄŻ¼į┌┤_Č©║├TCP³cų«║¾,Ż¼╩╣ė├ųžČ©╬╗╩ųäė▓┘ū„Ģr║“,Ż¼ÖC(j©®)Ų„╚╦Ą─äėū„Ģ■ć·└@ų°TCP▀M(j©¼n)ąą▀\(y©┤n)äėŻ®Ż©╗“š▀ų▒ĮėĖ·╣żŠ▀Ą─ÅS╝ęę¬╣żŠ▀Ą─öĄ(sh©┤)ō■(j©┤)Ż®
ŲõųąėąÄūĘN£y┴┐TCP³cĄ─ĘĮĘ©Ż║Ż©Ū░╚²éĆ³cĄ─ū╦æB(t©żi)ŽÓ▓Ņ▒M┴┐┤¾ą®Ż¼ėą└¹ė┌TCPŠ½Č╚Ą─╠ßĖ▀Ż®
1,Īó4³cĘ©,Ż¼▓╗Ė─ūātool0Ą─ū°ś╦(bi©Īo)ĘĮŽ“
2Īó5³cĘ©,Ż¼Ė─ūātool0Ą─zĘĮŽ“
3,Īó6³cĘ©Ż¼Ė─ūātool0Ą─x║═zĘĮŽ“
┤_šJ(r©©n)╣żŠ▀Ą─ųžą─║═▌d║╔öĄ(sh©┤)ō■(j©┤),Ż¼┐╔ęįš{(di©żo)ė├└²ąą│╠ą“ųąĄ─loadIdentifyüĒ▀M(j©¼n)ąąÖz£yŻ©£╩(zh©│n)┤_┬╩į┌90%ęį╔Ž▓┼┐╔ęį╩╣ė├įō┤╬Ą─öĄ(sh©┤)ō■(j©┤),Ż¼Ę±ätąĶę¬ųžą┬š{(di©żo)ė├Ż®
┤_šJ(r©©n)╣ż╝■ū°ś╦(bi©Īo)ŽĄ
╚²³cĘ©Č©┴xŻ©┤_šJ(r©©n)x1Ż¼x2,Ż¼y1╚²³cŻ®
7.▀M(j©¼n)ąąŠÄ│╠,Ż¼RAPID│╠ą“
8.š{(di©żo)įć═Ļ│╠ą“║¾Ż¼ūįäė▀\(y©┤n)ąąŻ©ŪąōQĄĮūįäė─Ż╩Į║¾,Ż¼░┤Ž┬ļŖÖC(j©®) ╔ŽļŖ/Å═(f©┤)╬╗ ░┤ŌoŻ®Ż©üĒį┤Ż║╔Ž║ŻABB╣ż│╠ėąŽ▐╣½╦ŠŻ®



 Ä═ų·ųąą─
Ä═ų·ųąą─ Ģ■åTųąą─
Ģ■åTųąą─ į┌ŠĆ┐═Ę■
į┌ŠĆ┐═Ę■