1,���C(j��)��ҕ�X(ju��)���˹�������Ҫ��ǰ�ؼ��g(sh��)
�C(j��)��ҕ�X(ju��)���˹������ИI(y��)����Ҫǰ�ط�֧,���C(j��)��ҕ�X(ju��)ͨ�^(gu��)ģ�M���ҕ�X(ju��)ϵ�y(t��ng)���x��C(j��)���������͡��J(r��n)֪��������,���ǙC(j��)���J(r��n)�R(sh��)����Ļ��A(ch��),���C(j��)��ҕ�X(ju��)���ó���ϵ�y(t��ng)����ҕ�X(ju��)��������ݔ���ֶΣ�����ҕ�X(ju��)����ϵ�y(t��ng)������XƤ�Ӻʹ��X��ʣ�ಿ����Ɍ�(du��)ҕ�X(ju��)�D���̎���ͽ��,���C(j��)�����Ԅ�(d��ng)��Ɍ�(du��)�ⲿ�����ҕ�X(ju��)��Ϣ��̽�y(c��),����������(y��ng)�Дಢ��ȡ�Є�(d��ng)����(sh��)�F(xi��n)����(f��)�s��ָ�]�Q�ߺ������Є�(d��ng),�������˹�����ǰ�ص��I(l��ng)��֮һ,��ҕ�X(ju��)��g(sh��)���˹�������I(y��)�IJ������c(di��n),�������^��ļ��g(sh��)�ֲ���
�C(j��)��ҕ�X(ju��)�����������I(l��ng)��(y��ng)�ÏV��,����������Ҫ�ɷ֞��Ĵ���R(sh��)�e,���y(c��)������λ�͙z�y(c��),���R(sh��)�e����ָ��eĿ��(bi��o)���w����������,���������Ρ��ɫ,���ַ�,���l�a�ȣ����(zh��n)�_�Ⱥ��R(sh��)�e�ٶ��Ǻ�������Ҫָ��(bi��o),���y(c��)������ָ�ѫ@ȡ�ĈD��������Ϣ��(bi��o)���ɳ��õĶ������λ,��Ȼ���ڈD���о��_��Ӌ(j��)���Ŀ��(bi��o)���w�Ďγߴ磬��Ҫ��(y��ng)���ڸ߾��ȼ���(f��)�s�ΑB(t��i)�y(c��)��,����λ����ָ�@ȡĿ��(bi��o)���w������(bi��o)�ͽǶ���Ϣ,���Ԅ�(d��ng)�Д����wλ�ã�������ȫ�Ԅ�(d��ng)�b������a(ch��n),���z�y(c��)����ָ��(du��)Ŀ��(bi��o)���w�M(j��n)�����^�z�y(c��),���Д�a(ch��n)Ʒ�b���Ƿ����������^�Ƿ����ȱ�ݡ�

2,�� �C(j��)��ҕ�X(ju��)�����ܘ�(g��u)
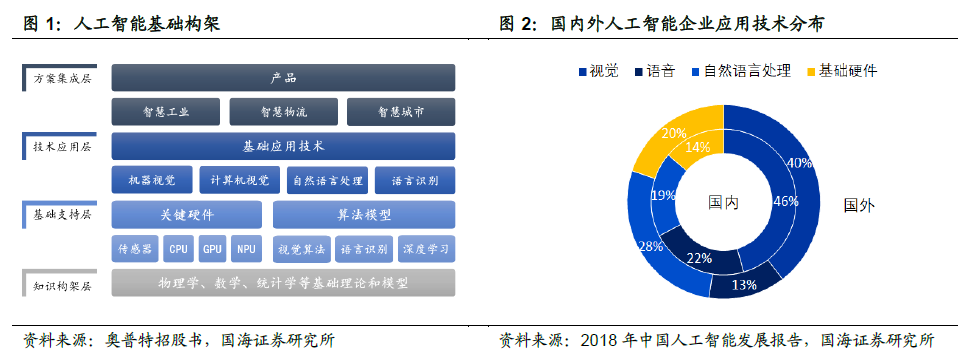
�C(j��)��ҕ�X(ju��)��Machine Vision����ָͨ�^(gu��)��W(xu��)�b�úͷǽ��|�������Ԅ�(d��ng)���ղ�̎���挍(sh��)���w�ĈD��,��������@ȡ������Ϣ�����ڿ��ƙC(j��)���\(y��n)��(d��ng)���b�á�ͨ���f(shu��),���C(j��)��ҕ�X(ju��)�����ÙC(j��)����������,���C(j��)��ҕ�X(ju��)ģ�M�۾��M(j��n)�ЈD��ɼ�����(j��ng)�^(gu��)�D���R(sh��)�e��̎����ȡ��Ϣ,����Kͨ�^(gu��)��(zh��)���b����ɲ���,��
���ģ�K��(g��u)���C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��������̖(h��o)������(d��ng)��C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��Ҫ������W(xu��)����,���D�������,���D��̎����IO ���@ʾ�����ģ�K,����W(xu��)����ģ�K�O(sh��)Ӌ(j��)�����Ĺ�Դ��·,��ͨ�^(gu��)�R�^���﷽���g��ϢͶӰ�����Ķ��@ȡĿ��(bi��o)���w������Ϣ,���D�������ģ�Kؓ(f��)؟(z��)��Ϣ�Ĺ����̖(h��o)�D(zhu��n)�Q,��Ŀǰ�����ĈD��������֞�CCD �cCMOS ����D��̎��ģ�K������CPU �����ĵ��·ϵ�y(t��ng)����Ϣ̎��оƬ,�����������ĈD��̎�������͔�(sh��)��(j��)�㷨��(k��),����ȡ��Ϣ���P(gu��n)�I����(sh��),��IO ģ�Kݔ���C(j��)��ҕ�X(ju��)ϵ�y(t��ng)�ĽY(ji��)���͔�(sh��)��(j��)���@ʾģ�K�����Ñ�ֱ�^�O(ji��n)�y(c��)ϵ�y(t��ng)���\(y��n)���^(gu��)��,����(sh��)�F(xi��n)�D��Ŀ�ҕ��,��

����(du��)�����ҕ�X(ju��)���ԣ��C(j��)��ҕ�X(ju��)�������̶�,���Ҷȷֱ���,�����g�ֱ������^�y(c��)�ٶȵȷ�������@����(y��u)��(sh��)�����������C(j��),���R�^,����Դ��Դ����ϵ�y(t��ng)�ɼ�Ŀ��(bi��o)���w��(sh��)��(j��)������ҕ�X(ju��)����ϵ�y(t��ng),������ҕ�X(ju��)ܛ���͔�(sh��)��(j��)�㷨��(k��)�M(j��n)�ЈD�η�����̎��,��ܛӲϵ�y(t��ng)���o���,���������Ԅ�(d��ng)��,�����ܻ������ИI(y��)�x��ҕ�X(ju��)�������S����ȌW(xu��)��(x��),��3D ҕ�X(ju��)���g(sh��),���߾��ȳ����g(sh��)�͙C(j��)��ҕ�X(ju��)��(li��n)��ͨ���g(sh��)�İl(f��)չ���C(j��)��ҕ�X(ju��)���܃�(y��u)��(sh��)�M(j��n)һ������,����(y��ng)���I(l��ng)��Ҳ�����(g��)�S������,��

3�� �C(j��)��ҕ�X(ju��)�l(f��)չ�v��
�C(j��)��ҕ�X(ju��)��Դ�������o(j��)50 ���,��Gilson ����ˡ��������@һ����,�����������P(gu��n)�y(t��ng)Ӌ(j��)ģ�Ͱl(f��)չ�������ص�Ӌ(j��)��ģʽ����(bi��o)־��2D Ӱ��y(t��ng)Ӌ(j��)ģʽ�İl(f��)չ,��1960 ��,������(gu��)�W(xu��)��Roberts ����ˏ�2D �D������ȡ���S�Y(ji��)��(g��u)���^�c(di��n)�����l(f��)��MIT �˹����܌�(sh��)�(y��n)�Ҽ������C(j��)��(g��u)��(du��)�C(j��)��ҕ�X(ju��)���P(gu��n)ע,������(bi��o)־�����S�C(j��)��ҕ�X(ju��)�о����_(k��i)ʼ,��
70 ������ڣ�MIT �˹����܌�(sh��)�(y��n)����ʽ�_(k��i)�O(sh��)���C(j��)��ҕ�X(ju��)���n��,���о��ˆT�_(k��i)ʼ�����M(j��n)�С����w�cҕ�X(ju��)�����P(gu��n)�n�}���о�,��1978 �꣬David Marr �_(k��i)��(chu��ng)�ˡ����¶��ϡ���ͨ�^(gu��)Ӌ(j��)��C(j��)ҕ�X(ju��)�����w����ķ���,��ԓ������2D��݆����������c(di��n),�������3D ����IJ����@һ�����������(bi��o)־���C(j��)��ҕ�X(ju��)�о����ش�ͻ��,��
80 ����_(k��i)ʼ,���C(j��)��ҕ�X(ju��)������ȫ���Ե��о��ᳱ,��������Փ�������£�OCR �����ܔz���^�Ⱦ����@һ�A�Ά�(w��n)��,���������l(f��)�˙C(j��)��ҕ�X(ju��)���P(gu��n)���g(sh��)����V���Ă����c��(y��ng)��,��
90 �������ҕ�X(ju��)��˾����,�����_(k��i)�l(f��)��һ���D��̎���a(ch��n)Ʒ,�����C(j��)��ҕ�X(ju��)���P(gu��n)���g(sh��)�������Ͷ�뵽���a(ch��n)�����^(gu��)����,��ʹ�ÙC(j��)��ҕ�X(ju��)�I(l��ng)��Ѹ�ٔU(ku��)��,���ϰټ���I(y��)�_(k��i)ʼ�����N�ۙC(j��)��ҕ�X(ju��)ϵ�y(t��ng)�������ęC(j��)��ҕ�X(ju��)�a(ch��n)�I(y��)��u�γ�,������(l��i)Դ���C(j��)�����ھ���



 ��������
�������� ��(hu��)�T����
��(hu��)�T���� �ھ��ͷ�
�ھ��ͷ�