0
ُ��܇
һ�����,���OӋ���I(y��)�C���˕r��ʹ�ÃɷN���a������W�c���Ծ��a��,����ôʲô�Ǿ��a����,��
���a����encoder���nj���̖�������������(sh��)��(j��)�M�о���,���D�Q�������ͨӍ,����ݔ�ʹ惦����̖��ʽ���O��,�����a���ѽ�λ�ƻ�ֱ��λ���D�Q�����̖��ǰ�߷Q��a�P,�����߷Q��a��,�������x����ʽ���a�����Է֞���|ʽ�ͷǽ��|ʽ�ɷN�����չ���ԭ�����a���ɷ֞�����ʽ�ͽ^��ʽ���,��
����ʽ���a���nj�λ���D�Q�������Ե����̖,���ٰ��@�����̖�D׃��Ӌ��(sh��)�}�_�����}�_�Ă���(sh��)��ʾλ�ƵĴ�С,���^��ʽ���a����ÿһ��λ�Ì���һ���_���Ĕ�(sh��)�ִa,���������ʾֵֻ�c�y������ʼ�ͽKֹλ�����P�����c�y�������g�^�̟o�P,��
һ,�����a���ķ��
����(j��)�z�yԭ��,�����a���ɷ֞��Wʽ,����ʽ���Б�ʽ�����ʽ,������(j��)��̶ȷ�������̖ݔ����ʽ,���ɷ֞�����ʽ���^��ʽ�Լ����ʽ���N,��
1,�� ����ʽ���a����
����ʽ���a����ֱ�����ù���D�Qԭ��ݔ�����M�����}�_A��B��Z��,��A,��B�ɽM�}�_��λ��90�ȣ��Ķ��ɷ�����Д�����D����,����Z����ÿ�Dһ���}�_,�����ڻ����c��λ�����ă�(y��u)�c��ԭ�혋�캆��,���Cеƽ���������ڎ��fС�r����,�����ɔ_���������ɿ��Ըߣ��m�����L���x��ݔ,����ȱ�c�ǟo��ݔ���S�D�ӵĽ^��λ����Ϣ,��
2�� �^��ʽ���a����
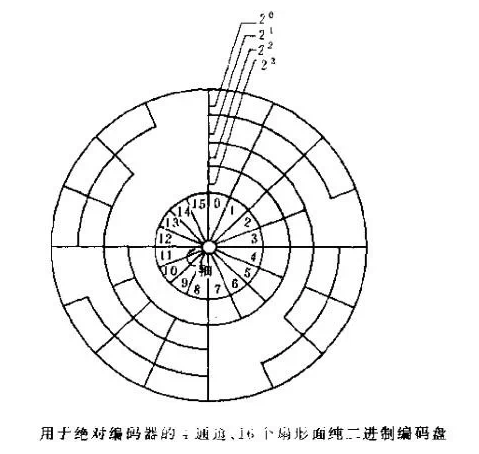
�^��ʽ���a����ֱ��ݔ����(sh��)�ֵĂ�����,�������ĈA�δa�P���؏���������ͬ�Ĵa�P,��ÿ�l��������Ͳ�������΅^(q��)���g�M�ɣ������a�����ȅ^(q��)��ľ���p���Pϵ,���a�P�ϵĴa����(sh��)�����Ķ��M�Ɣ�(sh��)�a��λ��(sh��),���ڴa�P��һ���ǹ�Դ����һ�Ȍ���ÿһ�a����һ����Ԫ��,�����a�P̎�ڲ�ͬλ�Õr,��������Ԫ������(j��)�ܹ����c���D�Q���������ƽ��̖���γɶ��M�Ɣ�(sh��),���@�N���a�������c�Dz�ҪӋ��(sh��)��,�����D�S������λ�ö����x��һ���̶����cλ���������Ĕ�(sh��)�ִa���@Ȼ,���a�����N�l�a��,��Ŀǰ����(n��i)����16λ�Ľ^�����a���a(ch��n)Ʒ��
3,�����ʽ�^�����a����
���ʽ�^�����a��,����ݔ���ɽM��Ϣ��һ�M��Ϣ���ڙz�y�ŘOλ��,�����н^����Ϣ����,����һ�M�t��ȫͬ����ʽ���a����ݔ����Ϣ��
��,����늾��a���đ���
�����;��a���c�^���;��a���^(q��)�e
1,���ǶȜy��
��܇�{�ģ�M����������P���D�ǶȵĜy���x�ù�늾��a�����������,�������y���x,�����ù�늾��a�����������D�S�c�����y���x���a�����o�S���B,��Ť�D�Ƕȃx,�����þ��a���y��Ť�D�Ƕ�׃������Ť�D���C,���O��Ť�D��Ԝyԇ��,���[�N�_���C�����þ��a��Ӌ��_���ǔ[��׃��,��
2,���L�Ȝy��
Ӌ����,�����ÝL݆���L��y�����w���L�Ⱥ;��x��
����λ�Ƃ�����,�������վ�݆���LӋ�����w�L�Ⱦ��x,��
(li��n)�Sֱ�y���c��ֱ��λ�ƵĄ����b�õ����S(li��n)�S,��ͨ�^ݔ���}�_��(sh��)Ӌ��,��
���|(zh��)�z�y����ֱ�X�l,���D��朗l���݆,��ͬ����݆�ȁ���fֱ��λ����Ϣ��
3,���ٶȜy��
���ٶ�,��ͨ�^���x���B�ӣ��y�����a(ch��n)���ľ��ٶ�
���ٶ�,��ͨ�^���a���y��늙C,���D�S�ȵ��ٶȜy��
4��λ�Üy��
�C������,��ӛ���C�����������c������λ��,�����@����
�Ԅӻ����Ʒ��棬����������λ���M��ָ������,�������,�������C��
5��ͬ������
ͨ�^���ٶȻ��ٶ�,�������ӭh(hu��n)��(ji��)�M��ͬ������,�����_����������
���������;��a�������D�ͣ�

1,������ԭ����
��һ���������S�Ĺ�늴a�P,�������Эh(hu��n)��ͨ,�����Ŀ̾�,���й�늰l(f��)��ͽ��������xȡ���@���ĽM���Ҳ���̖�M�ϳ�A,��B,��C��D,��ÿ�����Ҳ����90����λ�������һ���ܲ���360�ȣ�,����C��D��̖����,���B����A,��B������,����������(w��n)����̖����ÿ�Dݔ��һ��Z���}�_�Դ�����λ����λ,��
����A,��B�������90�ȣ���ͨ�^���^A����ǰ߀��B����ǰ,�����Єe���a�������D�c���D,��ͨ�^��λ�}�_���ɫ@�þ��a������λ����λ,��
���a���a�P�IJ����в���,�����١�����,�������a�P���ڲ����ϳ��e�ܱ��Ŀ̾�,����᷀(w��n)���Ժã����ȸ�,�����ٴa�Pֱ����ͨ�Ͳ�ͨ�̾�,�������飬�����ڽ�����һ���ĺ��,�����Ⱦ�������,����᷀(w��n)���Ծ�Ҫ�Ȳ����IJ�һ����(sh��)���������ϴa�P�ǽ�(j��ng)���͵�,����ɱ���,�������ȡ��᷀(w��n)����,��������Ҫ��һЩ,��
�ֱ��ʡ����a����ÿ���D360���ṩ���ٵ�ͨ�̾��Q��ֱ��ʣ�Ҳ�Q�����ֶ�,����ֱ�ӷQ���پ�,��һ����ÿ�D�ֶ�5~10000����
2,����̖ݔ����
��̖ݔ�������Ҳ��������늉���,��������TTL��HTL��,����늘O�_·��PNP,��NPN��������ʽ��N��ʽ,������TTL���L������ӣ����QA,��A-;B��B-;Z,��Z-��,��HTLҲ�Q����ʽ,������ʽݔ�������a������̖�����O��ӿڑ��c���a������,��
��̖�B�ӡ����a�����}�_��̖һ���B��Ӌ��(sh��)��,��PLC��Ӌ��C,��PLC��Ӌ��C�B�ӵ�ģ�K�е���ģ�K�c����ģ�K֮��,���_�P�l���е��иߡ�
�����(li��n)��,�����چη���Ӌ��(sh��),���η���y�١�
A.B����(li��n)��,������������Ӌ��(sh��),���Д�������͜y�١�
A,��B,��Z����(li��n)�ӣ����ڎ�����λ������λ�Üy��,��
A,��A-��B,��B-,��Z��Z-�B��,�����ڎ��Ќ��Qؓ��̖���B��,�����������|ؕ�I��늴ň���0��˥�p��С,�����ɔ_���,���ɂ�ݔ�^�h�ľ��x��
����TTL�Ď��Ќ��Qؓ��̖ݔ���ľ��a��,����̖��ݔ���x���_150��,��
����HTL�Ď��Ќ��Qؓ��̖ݔ���ľ��a������̖��ݔ���x���_300��,��
3,������ʽ���a���Ć��}��
�����;��a���������c��Ӌ�`����ɔ_�^��,�������O���ͣ�C����ӛ�����_�C�������λ�Ȇ��},���@Щ���}���x�ý^���;��a�����Խ�Q,��
�����;��a����һ�㑪�ã�
�y��,���y�D�ӷ��y�ƄӽǶ�,�����x��������,��
�ġ��^���;��a�������D�ͣ�
�^�����a����a�P�����S�����ͨ���̾�,��ÿ���̾�������2��,��4����8��,��16 ����������,���@�ӣ��ھ��a����ÿһ��λ��,��ͨ�^�xȡÿ���̾���ͨ,�������@��һ�M��2����η���2��n-1�η���Ψһ��2�M�ƾ��a�����״a��,���@�ͷQ��nλ�^�����a��,���@�ӵľ��a�����ɹ�늴a�P�ęCеλ�ÛQ���ģ�������ͣ�,���ɔ_��Ӱ�,��
�^�����a���əCеλ�ÛQ����ÿ��λ����Ψһ�ģ����o��ӛ��,���o���҅����c,�����Ҳ���һֱӋ��(sh��)��ʲô�r����Ҫ֪��λ��,��ʲô�r���ȥ�xȡ����λ��,���@�ӣ����a���Ŀ��ɔ_����,����(sh��)��(j��)�Ŀɿ��Դ�������,��
�塢��Ȧ�^��ֵ���a���c��Ȧ�^��ֵ���a��
���D��Ȧ�^��ֵ���a��,�����D���Мy����늴a�P�����̾�,���ԫ@ȡΨһ�ľ��a�����D�ӳ��^360�ȕr,�����a�ֻص�ԭ�c,���@�ӾͲ����Ͻ^�����aΨһ��ԭ�t���@�ӵľ��aֻ���������D����360���ԃ�(n��i)�Ĝy��,���Q���Ȧ�^��ֵ���a��,��
���Ҫ�y�����D���^360�ȷ�������Ҫ�õ���Ȧ�^��ֵ���a��,��
���a�����a(ch��n)�S���\��犱��X݆�Cе��ԭ��,�������Ĵa�P���D�r,��ͨ�^�X݆������һ�M�a�P�����M�X݆����M�a�P��,���چ�Ȧ���a�Ļ��A��������Ȧ��(sh��)�ľ��a,���ԔU�a���Ĝy���������@�ӵĽ^�����a���ͷQ���Ȧʽ�^�����a��,����ͬ�����əCеλ�ô_�����a,��ÿ��λ�þ��aΨһ���؏ͣ����o��ӛ��,��
��Ȧ���a����һ����(y��u)�c�����ڜy��������,�����Hʹ��������ԣ�^�࣬ �@���ڰ��b�r����Ҫ�M�������c,�� ��ijһ���gλ��������ʼ�c�Ϳ�����,��������˰��b�{(di��o)ԇ�y�ȡ�����Դ���C�����ھ���



 ��������
�������� ���T����
���T���� �ھ��ͷ�
�ھ��ͷ�