�C(j��)��������Θ�(bi��o)������,���c��һ�ӣ��C(j��)���˵Ę�(bi��o)����ʽ�x���_����ϵ�y(t��ng)����������ͨ���f,�����Ǯ�(d��ng)�۾�����һ��(g��)�|����Ҫ��ȥץȡ������������(d��ng)�����@��(g��)�r(sh��)����X���֪�����c�۾�������(bi��o)�P(gu��n)ϵ,��
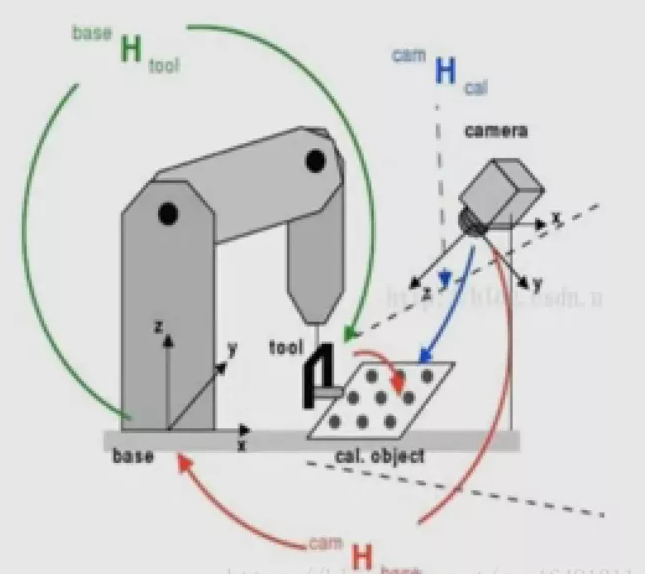
����Ѵ��X����B,�����۾�����A,�����ֱ���C,���A��B���P(gu��n)ϵ֪����B��C���P(gu��n)ϵ֪��,����ôC��A���P(gu��n)ϵ��֪����,��Ҳ�����ֺ��۵�����(bi��o)�P(gu��n)ϵҲ��֪���ˡ�
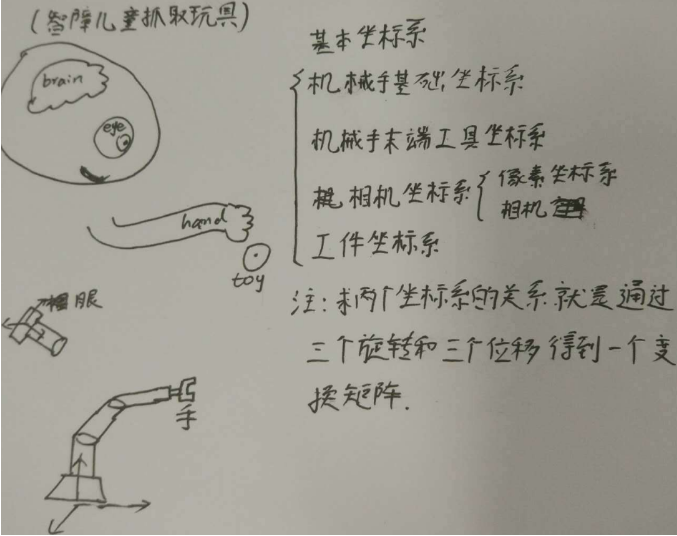
���C(j��)֪��������������(bi��o),���C(j��)е���ǿ��g����(bi��o)ϵ,���������ۘ�(bi��o)�����ǵõ���������(bi��o)ϵ�Ϳ��g�C(j��)е������(bi��o)ϵ������(bi��o)�D(zhu��n)���P(gu��n)ϵ��
�ڌ�(sh��)�H������,�����C(j��)�z�y(c��)��Ŀ��(bi��o)�ڈD���е�����λ�ú�,��ͨ�^��(bi��o)���õ�����(bi��o)�D(zhu��n)�Q��ꇌ����C(j��)����������(bi��o)׃�Q���C(j��)е�ֵĿ��g����(bi��o)ϵ�У�Ȼ�����(j��)�C(j��)е������(bi��o)ϵӋ(j��)�������(g��)늙C(j��)ԓ����\(y��n)��(d��ng),���Ķ����ƙC(j��)е�ֵ��_(d��)ָ��λ��,���@��(g��)�^�����漰���ˈD���(bi��o)�����D��̎��,���\(y��n)��(d��ng)�W(xu��)�����,�����ۘ�(bi��o)���ȡ�
���õĘ�(bi��o)�������У����c(di��n)��(bi��o)��
���c(di��n)��(bi��o)����
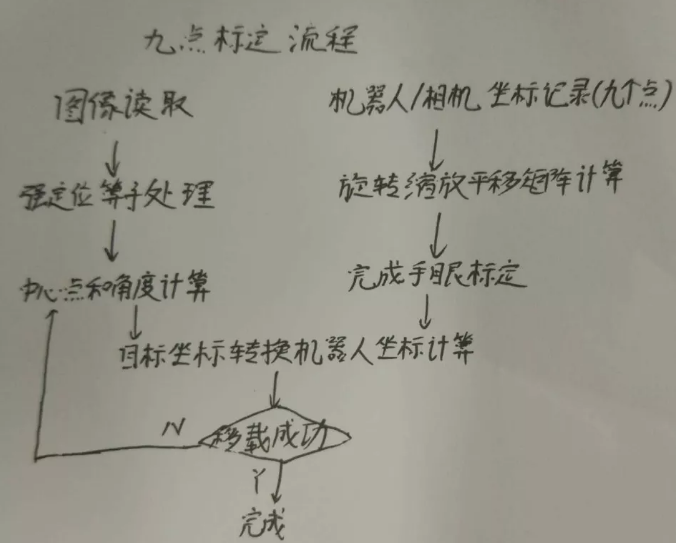
���c(di��n)��(bi��o)��ֱ�ӽ������C(j��)�͙C(j��)е��֮�g������(bi��o)׃�Q�P(gu��n)ϵ,��
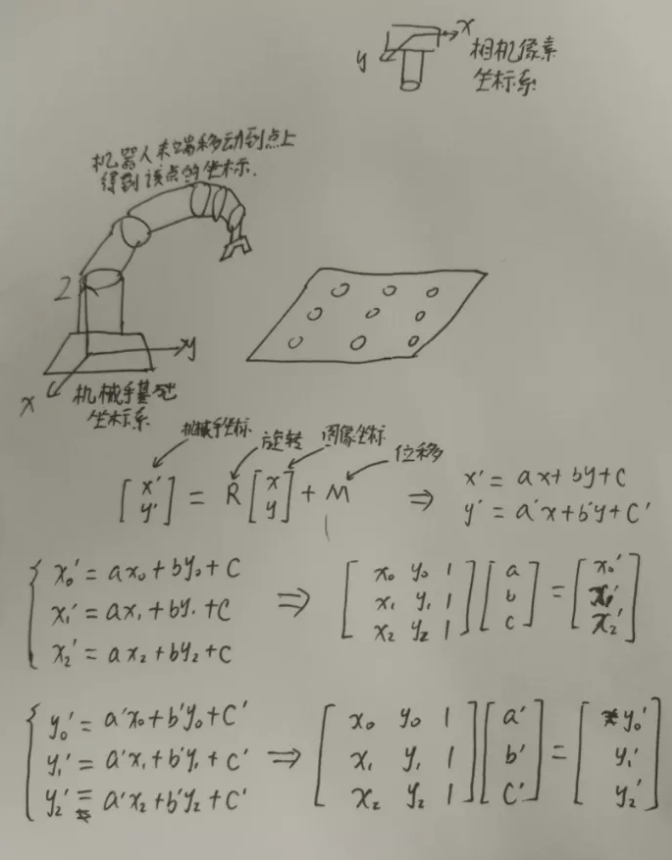
�C(j��)е�ֵ�ĩ��ȥ���@��9��(g��)�c(di��n)�õ��ڙC(j��)��������(bi��o)ϵ�е�����(bi��o),��ͬ�r(sh��)߀Ҫ�����C(j��)�R(sh��)�e9��(g��)�c(di��n)�õ���������(bi��o)���@�Ӿ͵õ���9�M��(du��)��(y��ng)������(bi��o),��
�������ʽ�ӿ�֪������Ҫ3��(g��)�c(di��n)���������(bi��o)���ľ��,��
��1��,����(bi��o)��,��Halcon���M(j��n)��9�c(di��n)��(bi��o)��������
C#
%ǰ������D������(bi��o)
area_center(SortedRegions��Area,Row,Column) %
Column_robot := [275,225,170,280,230,180,295,240,190]
%�C(j��)����ĩ���\(y��n)��(d��ng)��9�c(di��n)��������(bi��o)
Row_robot := [55,50,45,5,0,-5,-50,-50,-50]
%�C(j��)����ĩ���\(y��n)��(d��ng)��9�c(di��n)��������(bi��o)
vector_to_hom_mat2d(Row,Column,Row_robot,Column_robot,HomMat2D)
%���׃�Q���,��HomMat2D�LjD������(bi��o)�͙C(j��)е������(bi��o)֮�g���P(gu��n)ϵ
��2��,�����
C#
affine_trans_point_2d(HomMat2D,Row2,Column2,Qx,Qy)
%����������(bi��o)�͘�(bi��o)���������C(j��)���˻��A(ch��)����(bi��o)ϵ�е�����(bi��o)
һЩ������r�Ľ�ጣ�
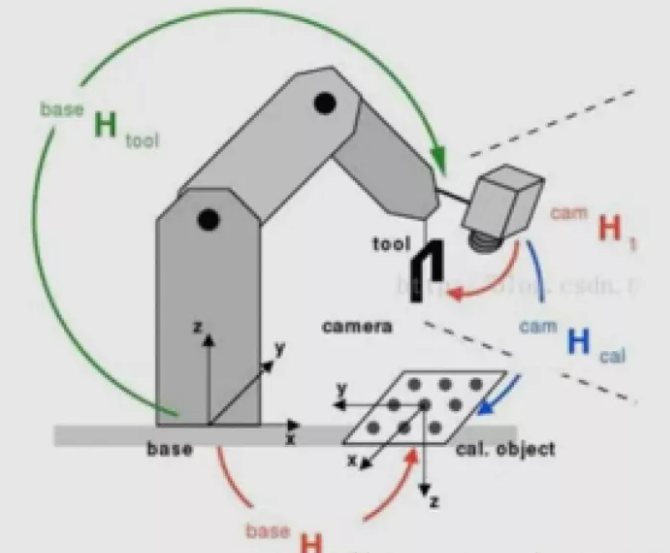
��Щ��r���҂��������C(j��)�̶���һ��(g��)�ط���Ȼ�������ҵ�Ŀ��(bi��o),�����ƙC(j��)е��ȥץȡ,���@�N�ͺܺ����⡣�҂�Ҳ����eye-to-hand
߀��һ�N��r�����C(j��)�̶��ڙC(j��)е������,���@�N��r�Ę�(bi��o)���^�̌�(sh��)�H�Ϻ����C(j��)�͙C(j��)е�ַ��x�Ę�(bi��o)��������һ�ӵ�,����?y��n)����C(j��)���Օr(sh��)���C(j��)е�֕�(hu��)�\(y��n)��(d��ng)�����C(j��)��(bi��o)���ĕr(sh��)���λ��,��Ȼ�����C(j��)����,���õ�Ŀ��(bi��o)������(bi��o)���ٿ��ƙC(j��)е��,�����Ժ�(ji��n)�ε����C(j��)�̶���ĩ�˵�����ϵ�y(t��ng)�ܶ�Dz����@�N����,����(bi��o)�����^�̺����۷��xϵ�y(t��ng)�Ę�(bi��o)���ǿ�����ͬ��(du��)����,���҂�Ҳ����eye-in-hand
��(l��i)Դ���C(j��)�����ھ�



 ��������
�������� ��(hu��)�T����
��(hu��)�T���� �ھ��ͷ�
�ھ��ͷ�