0
ُ��܇
1,��һ�_֧��Modbus�f(xi��)�h�ķQ�x��
֧��Modbus�f(xi��)�h�ķQ�x��
2,���O(sh��)�úÃx����ͨӍ����(sh��)
����(j��)�Լ���Ҫ������{(di��o)����ֻҪ��PLC�˽y(t��ng)һ�Ϳ���
�����ʣ�9600
��(sh��)��(j��)��ʽ��8n1:8λ��(sh��)��(j��)/�oУ�λ
ͨӍ��ʽ��Modbus�f(xi��)�h
У�ͣ�OFF
�x��ͨӍ��ַ��1
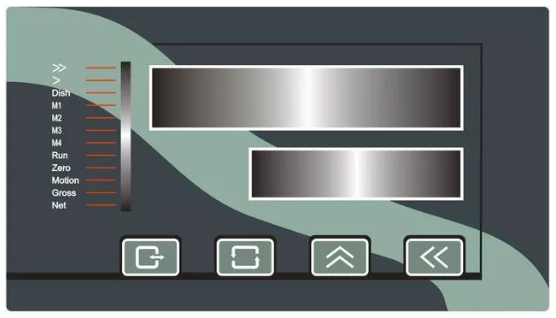
3���_����Ҫ�xȡ��׃����ַ
�@���҂�ֻ��Ҫ�xȡ�x���Į�(d��ng)ǰ���r��������
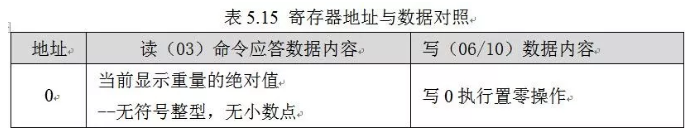
�x�팍�r�����ĵ�ַ��0������(y��ng)ModbusͨӍ���40001
4��200smartPLCһ�_
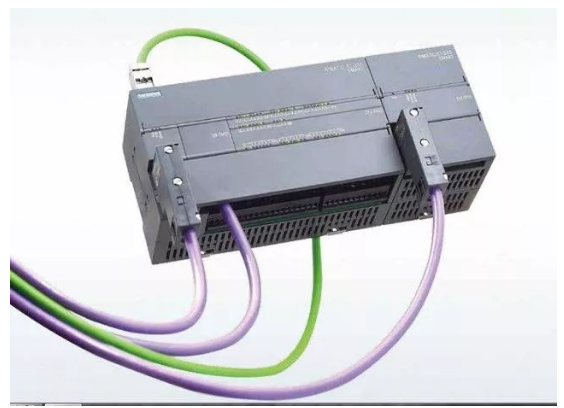
200smartPLC
5���B�Ӷ˿�
���x���˵�RS485�ӿ�A,��B�cPLC�˵�DB9�ӿ����B��DB9�ӿڵ�3��A,��8��B��
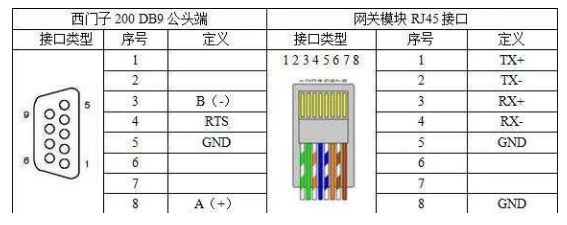
��ӛ����3��A,��8��B,����֪�ˈD��ʲô�@��,�����^��Ҫ�o,�������ͬ,�����ɸ����һ��
��(zh��n)�乤���ꮅ���������_ʼ�҂���PLC������,�����200smartܛ�������͎���Modbus�f(xi��)�h��,������,������Ҫ�҂�����ȥ������,������ͽ�B����ô���̵�,��
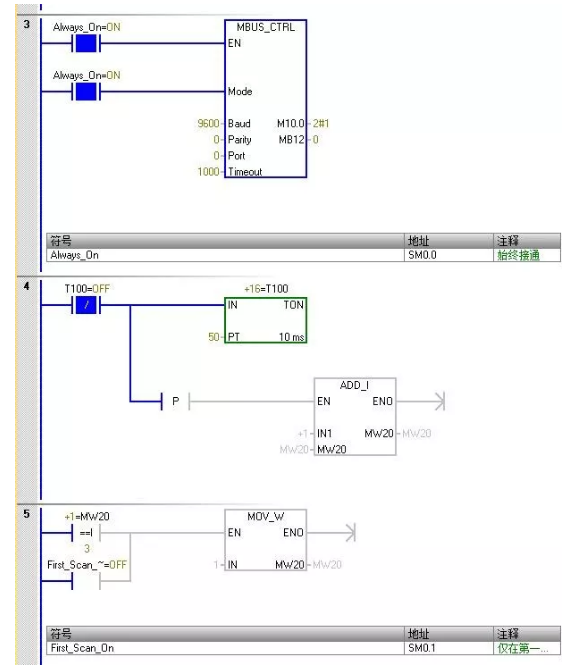
6,����ʼ����վָ��
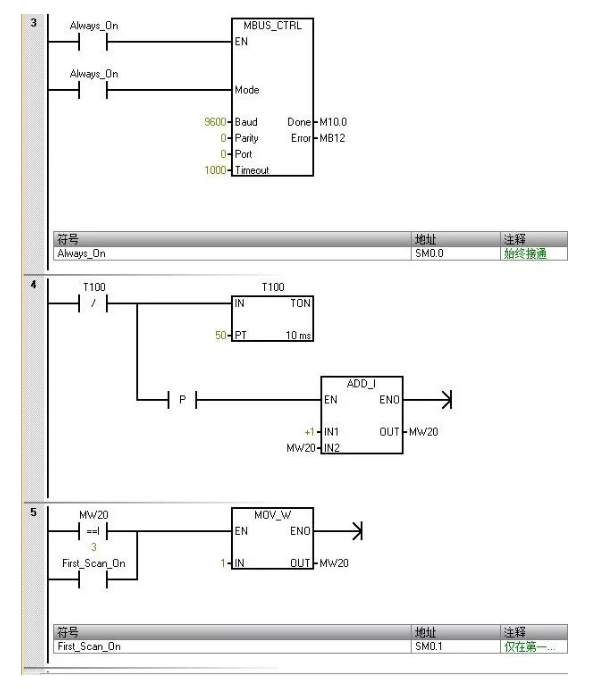
��ģʽ��(Mode) ݔ���ֵ�����x��ͨ�Ņf(xi��)�h,��ݔ��ֵ�� 1 �r���� CPU �˿ڷ���o Modbus �f(xi��)�h������ԓ�f(xi��)�h,��
����(sh��)����żУ(Parity) ��(y��ng)�O(sh��)�Þ��c Modbus ��վ�O(sh��)�����żУ���ƥ��,��0���o��żУ
����(sh��)���˿ڡ�(Port)�O(sh��)������ͨ�Ŷ˿ڣ�0 = CPU �м��ɵ� RS-485����
����(sh��)�����r��(Timeout) �O(sh��)��ȴ���վ����푑�(y��ng)�ĺ��딵(sh��)������ֵ�� 1000 ms (1 s),��
��(d��ng) MBUS_CTRLָ����ɕr��ָ����桱(TURE) ���ؽo����ɡ�(Done) ݔ��,��
���e�`��(Error) ݔ������ָ���(zh��)�еĽY(ji��)��,��
���ϵą���(sh��)�O(sh��)���c�Q�x���˵Č���(y��ng)
7���ɂ��x����݆ԃ�L��
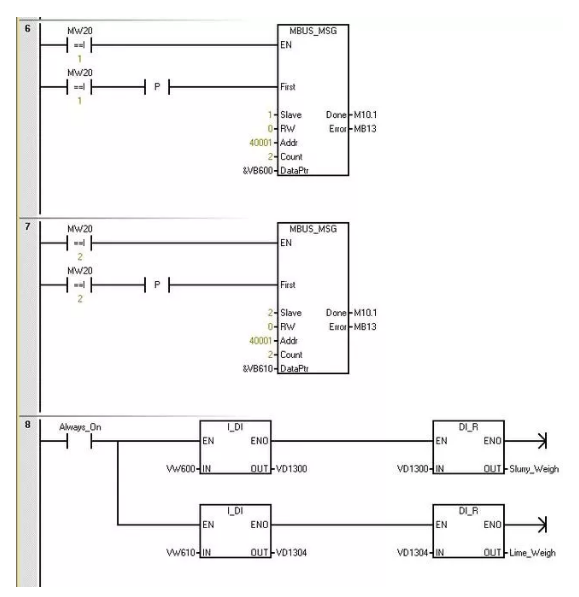
����(sh��)����վ��(Slave) �� Modbus ��վ�O(sh��)��ĵ�ַ�����S������ 0 �� 247,����ַ 0 �ǏV����ַ���H����ַ 0 ���ڌ���Ո��,��ϵ�y(t��ng)����푑�(y��ng)����ַ 0 �ďV��Ո�������Џ�վ�O(sh��)�䶼֧�֏V����ַ,��S7-200 SMART Modbus ��վ�첻֧�֏V����ַ,��
ʹ�Å���(sh��) RW ָʾ���xȡ߀�nj���ԓ��Ϣ,��0���x�,���
����(sh��)��ַ (Addr) ����ʼ Modbus ��ַ,���Ĵ�����ַ��0������(y��ng)ModbusͨӍ��ĵ�ַ40001
����(sh��)��Ӌ��(sh��)��(Count) ���ڷ���Ҫ��ԓՈ�����xȡ��?q��)���Ĕ?sh��)��(j��)Ԫ�ؔ�(sh��)���xȡ�x���б��ּĴ�����?j��n)?sh��),��
����(sh��) DataPtr ���g�ӵ�ַָ�,��ָ�� CPU ���c�xՈ�����P(gu��n)�Ĕ�(sh��)��(j��)�� V �惦��,���� DataPtr �O(sh��)�Þ����ڴ惦�� Modbus ��վ�xȡ�Ĕ�(sh��)��(j��)�ĵ�һ�� CPU �惦��Ԫ,��
��ַ1�ăx�픵(sh��)��(j��)�����뵽VW600��,����ַ2�ăx�픵(sh��)��(j��)�����뵽VW610�С�
���̽Y(ji��)��,�������҂����±O(ji��n)��Ч��,��
��վ��ʼ��ָ���\������,���]�Ј��e
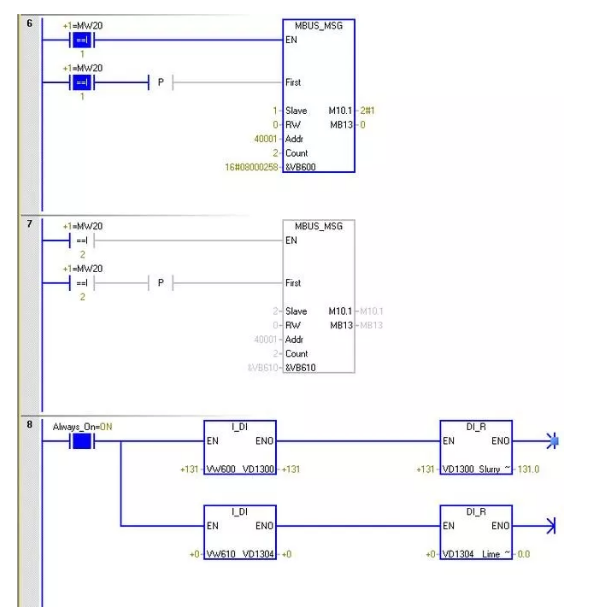
��ַ1�x�픵(sh��)��(j��)��131,����ַ2�x�픵(sh��)��(j��)��0����Դ���C(j��)�����ھ���



 ��������
�������� ���T����
���T���� �ھ��ͷ�
�ھ��ͷ�